Ένα οβάλ ρομπότ, με μέγεθος λίγο μικρότερο από αυτό μιας μπάλας ποδοσφαίρου, το οποίο έχει τη δυνατότητα να γλιστρά πάνω σε υποβρύχιες επιφάνειες πραγματοποιώντας σαρώσεις υπερήχων, παρουσίασαν ερευνητές του ΜΙΤ στο πλαίσιο της International Conference on Intelligent Robots and Systems.
To εν λόγω ρομπότ είχε σχεδιαστεί αρχικά για να αναζητεί ρωγμές σε δεξαμενές νερού πυρηνικών αντιδραστήρων- ωστόσο η χρήση για την οποία φαίνεται να προορίζεται εν τέλει είναι η αναζήτηση κρυψώνων στο κύτος πλοίων οι οποίες χρησιμοποιούνται από λαθρεμπόρους . Χάρη στο μικρό του μέγεθος και τον καινοτόμο μηχανισμό προώθησης, ο οποίος δεν αφήνει πίσω του ίχνη, το ρομπότ θα μπορούσε επίσης να κρύβεται εύκολα στο υποβρύχιο περιβάλλον- με «σμήνη» να σπεύδουν να ελέγξουν πλοία στο λιμάνι χωρίς να γίνονται αντιληπτά από τους λαθρεμπόρους, οι οποίοι σε τέτοιες περιπτώσεις επιχειρούν συχνά να πετάξουν το φορτίο στη θάλασσα.

MIT
«Είναι πολύ ακριβό για την ασφάλεια των λιμανιών να χρησιμοποιούνται ‘παραδοσιακά’ ρομπότ για κάθε μικρό σκάφος που έρχεται στο λιμάνι» λέει η Σαμπρίτι Μπατατσάρια, τελειόφοιτη μηχανολογίας- μηχανικής, η οποία σχεδίασε το ρομπότ μαζί με τον σύμβουλό της, Χάρι Ασάντα (Ford Professor of Engineering). «Αν είναι αρκετά φθηνό – εάν μπορώ ας πούμε να το κάνω με 600 δολάρια- γιατί να μην έχουμε 20 από αυτά να πραγματοποιούν συλλογικές επιθεωρήσεις; Και αν χαλάσει δεν έγινε και τίποτα. Η κατασκευή του είναι πολύ εύκολη».
Η Μπατατσάρια κατασκεύασε τα βασικά δομικά τμήματα του ρομπότ χρησιμοποιώντας έναν 3D εκτυπωτή στο εργαστήριο του Ασάντα. Το μισό είναι αδιάβροχο και στεγάζει τα ηλεκτρονικά, ενώ το άλλο μισό είναι διαπερατό και διαθέτει το σύστημα προώθησης- που αποτελείται από έξι αντλίες οι οποίες εξωθούν νερό μέσω ελαστικών σωλήνων. Το ελλειπτικό σχήμα του είναι εσκεμμένα ασταθές, για να μπορεί να έχει αυξημένη ευελιξία (όπως στα μαχητικά αεροσκάφη), ενώ ο σχεδιασμός του είναι τέτοιος ώστε να μπορεί να παραμένει προσκολλημένο σε οποιαδήποτε επιφάνεια ελέγχει.
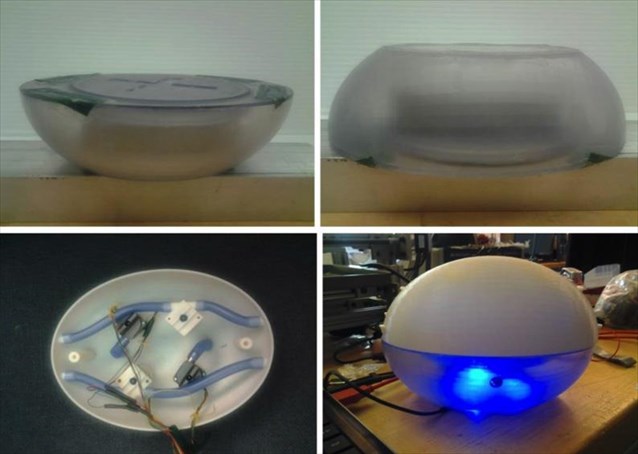
MIT
Στο στεγανό θάλαμο του ρομπότ βρίσκεται το κύκλωμα ελέγχου του, η μπαταρία του, μια κεραία επικοινωνιών και μια αδρανειακή μονάδα μέτρησης, η οποία μπορεί να μετρήσει την κίνηση του ρομπότ σε οποιαδήποτε κατεύθυνση.
Οι επαναφορτιζόμενες μπαταρίες λιθίου που χρησιμοποιούνται στο πρωτότυπο, σημειώνει η Μπατατσάρια, έχουν διάρκεια περίπου 40 λεπτών, χρονικό διάστημα το οποίο θεωρείται επαρκές για τη διεξαγωγή πολλαπλών ελέγχων μικρών. Οι ερευνητές οραματίζονται ομάδες ρομπότ που δουλεύουν σε «βάρδιες», με κάποια να αναλαμβάνουν καθήκοντα όταν τα άλλα πηγαίνουν για φόρτιση.
Το επόμενο πρωτότυπο επιδιώκεται να έχει μπαταρίες που φορτίζονται ασύρματα, βελτιωμένο σύστημα προώθησης που θα αυξάνει τη διάρκεια λειτουργίας με μία φόρτιση στα 100 λεπτά και πιθανώς συστήματα που θα επιτρέπουν τη διεξαγωγή ελέγχων με υπερήχους χωρίς το ρομπότ να έρχεται σε άμεση επαφή με την επιφάνεια του υπό επιθεώρηση σκάφους.