Πολλοί είναι αυτοί που ασχολούνται με την τεχνολογία αυτόνομων οχημάτων, ωστόσο πρόκειται αναμφισβήτητα για ένα δύσκολο αντικείμενο, καθώς οι παράγοντες που πρέπει να λαμβάνονται υπόψιν για την ασφαλή αυτόνομη κίνηση ενός οχήματος είναι πάρα πολλοί. Ως αποτέλεσμα, οι περισσότεροι ερευνητές που ασχολούνται με το αντικείμενο κάνουν τη ζωή τους ευκολότερη, δουλεύοντας πάνω σε οχήματα που κινούνται σε ασφαλτοστρωμένους, «κανονικούς» δρόμους- αλλά αυτό δεν ισχύει για ερευνητές του CSAIL (Computer Science and Artificial Intelligence Laboratory) του ΜΙΤ, που δουλεύουν πάνω στο σύστημα MapLite, σκοπός του οποίου είναι η πλοήγηση εκτός δρόμων, μόνο με GPS και αισθητήρες.
Όπως αναφέρει το MIT News, το σύστημα αυτό αναπτύσσεται από την Ντανιέλα Ρας, διευθύντρια του CSAIL και συνεργάτες της, που φιλοδοξούν να αυξήσουν το εύρος των περιοχών που μπορούν να κινηθούν αυτόνομα οχήματα, ξεφεύγοντας από τον περιορισμό των 3D χαρτών για τις αστικές περιοχές. Το MapLite συνδυάζει απλά δεδομένα GPS που μπορεί να βρει κανείς στο Google Maps με μια σειρά αισθητήρων που παρατηρούν τις συνθήκες και την κατάσταση του δρόμου. Χρησιμοποιώντας αυτά τα δύο στοιχεία, οι ερευνητές ήταν σε θέση να κάνουν το όχημά τους (ένα ειδικά διαμορφωμένο Toyota Prius) να κινείται σε χωματόδρομους σε Ντέβενς της Μασαχουσέτης, ανιχνεύοντας επιτυχώς τον δρόμο σε απόσταση 30 μέτρων μπροστά.
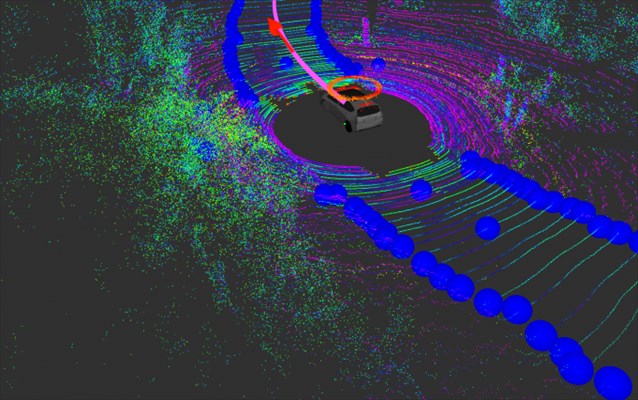
CSAIL
«Ο λόγος που αυτή η προσέγγιση άνευ χαρτών δεν είχε χρησιμοποιηθεί ξανά είναι επειδή σε γενικές γραμμές είναι πολύ δυσκολότερο να έχεις την ίδια ακρίβεια και αξιοπιστία από ό,τι με λεπτομερείς χάρτες» λέει ο Τέντι Ορτ, τελειόφοιτος του CSAIL και lead author σε σχετικό paper. «Ένα τέτοιο σύστημα, που μπορεί να πλοηγηθεί μόνο με τους αισθητήρες που διαθέτει, δείχνει τις δυνατότητες των αυτόνομων οχημάτων, που μπορούν να τα βγάλουν πέρα με δρόμους πέρα από από τους λίγους που έχουν χαρτογραφήσει οι εταιρείες τεχνολογίας».
Το σχετικό paper θα παρουσιαστεί μέσα στον Μάιο στην International Conference on Robotics and Automation (ICRA) στο Μπρισμπέιν της Αυστραλίας. Αξίζει να σημειωθεί πως το MapLite χρησιμοποιεί τους αισθητήρες που διαθέτει για κάθε πλευρά της πλοήγησης, χρησιμοποιώντας τα δεδομένα GPS μόνο για να αποκτά μια γενική εικόνα σχετικά με τη θέση του αυτοκινήτου. Το σύστημα θέτει πρώτα έναν τελικό προορισμό και αυτό που οι ερευνητές αποκαλούν «τοπικό στόχο πλοήγησης», ο οποίος πρέπει να βρίσκεται εντός οπτικού πεδίου του αυτοκινήτου. Οι αισθητήρες στη συνέχεια ορίζουν μια πορεία προς εκείνο το σημείο, χρησιμοποιώντας LIDAR για να υπολογίζουν πού βρίσκονται οι άκρες του δρόμου. Το MapLite μπορεί να το κάνει αυτό χωρίς πινακίδες στον δρόμο, προβαίνοντας σε γενικού χαρακτήρα εκτιμήσεις σχετικά με το πώς στον δρόμο το έδαφος θα είναι πιο επίπεδο σε σχέση με γύρω.
Βεβαίως, το σύστημα έχει ακόμα κάποιους περιορισμούς, όπως το ότι δεν είναι αρκετά αξιόπιστο ακόμα για ορεινούς δρόμους- ωστόσο οι ερευνητές επιδιώκουν να αυξήσουν το εύρος των δρόμων στους οποίους μπορεί να κινηθεί.