Έναν ρομποτικό βραχίονα που μπορεί να μεταχειρίζεται μικρά και εύθραυστα αντικείμενα χωρίς να τα αγγίζει αναπτύσσει ο Μαρσέλ Σουκ, ερευνητής του ETH Zurich.
Η συγκεκριμένη τεχνολογία βασίζεται σε ηχητικά κύματα: Όπως εξηγεί ο ίδιος, το φαινόμενο είναι γνωστό ως ακουστική αιώρηση.
Ο Σουκ, πρώην διδακτορικός του ΕΤΗ, αναπτύσσει τη συγκεκριμένη μέθοδο για την ανύψωση και μεταχείριση εξαιρετικά μικρών και εύθραυστων αντικειμένων, που μπορούν να υποστούν εξαιρετικά δαπανηρές ζημιές. Οι συμβατικοί ρομποτικοί βραχίονες είναι επιρρεπείς στην πρόκληση ζημιών, και για την αποφυγή τους χρησιμοποιούνται μαλακές, ελαστικές επικαλύψεις. Οι επικαλύψεις αυτές ωστόσο μπορούν να μολυνθούν εύκολα, ενώ δεν έχουν και πολύ μεγάλη ακρίβεια.
ETH ZÜRICH /STEFAN WEISS
Το project του Σουκ έχει τίτλο «No-Touch Robotics» και η τεχνολογία βασίζεται σε ένα φαινόμενο που αξιοποιείται εδώ και πολλά χρόνια, ενώ είχε χρησιμοποιηθεί αρχικά στην εξερεύνηση του διαστήματος. Τα κύματα υπερήχων παράγουν ένα πεδίο πίεσης που οι άνθρωποι δεν μπορούν να βλέπουν ή να ακούν. Τα σημεία πίεσης δημιουργούνται καθώς τα ακουστικά κύματα αλληλοεπικαλύπτονται, και μικρά αντικείμενα μπορούν να παγιδευτούν μεταξύ τους. Ως αποτέλεσμα, φαίνονται να αιωρούνται στον αέρα, σε μια «ακουστική παγίδα».
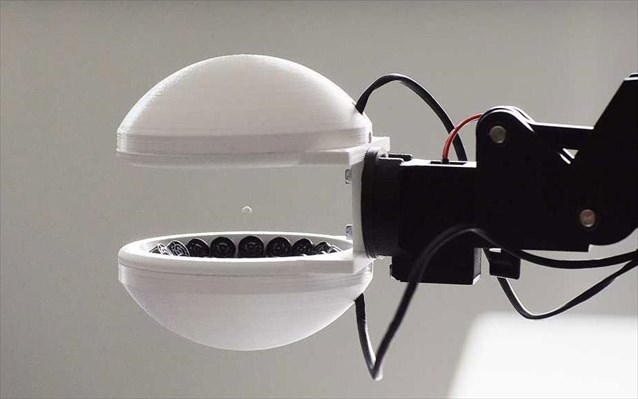
Στο εργαστήριό του ο 31χρονος ερευνητής έχει μια εγκατάσταση η οποία αποτελεί το πρωτότυπο της συσκευής που θέλει να αναπτύξει: Έναν ηλεκτρονικά ελεγχόμενο ρομποτικό βραχίονα που χρησιμοποιεί υπερήχους. Ο ερευνητής πέρασε πολλά μικρά ηχεία σε δύο ημισφαίρια και ειδικό λογισμικό του επιτρέπει να χρησιμοποιεί τα ηχεία έτσι ώστε τα σημεία πίεσης να μετακινούνται. Ο σκοπός είναι η αλλαγή θέσης σε πραγματικό χρόνο χωρίς το αντικείμενο να πέφτει στο έδαφος. Πάνω στο συγκεκριμένο αντικείμενο εργάζονται και άλλοι δύο ερευνητές, οι Μαρκ Ρέθλισμπεργκερ και Κριστιάν Μπουρκάρ.
Χρησιμοποιώντας την υπάρχουσα τεχνολογία, οι ερευνητές μπορούν να μετακινούν μικρά αντικείμενα στον χώρο. Το λογισμικό ρυθμίζει τη λαβίδα έτσι ώστε να είναι κατάλληλος για το σχήμα του αντικειμένου που θα πιάσει, και ένας ρομποτικός βραχίονας μετά μετακινεί το αντικείμενο στον προορισμό του. Σημειώνεται πως η συγκεκριμένη αρχή έχει και οικονομικό όφελος, καθώς, στα συμβατικά ρομπότ, απαιτείται διαφορετική λαβίδα για κάθε σχεδόν νέο σχήμα. Η ακουστική λαβίδα εξαλείφει αυτή την ανάγκη. Επίσης, όπως σημειώνει ο Σουκ, δεν χρειάζεται καν η λαβίδα να είναι υψηλής ακριβείας: «Η ακριβής θέση ορίζεται από τα ακουστικά κύματα που ελέγχονται από το λογισμικό».